[GameMath] 게임 수학
벡터1
직선의 수 집합을 수직으로 배치해 평면을 표기하는 방식을 데카르트 좌표계(Cartesian coordinate system)라고 부른다.
두 개 이상의 실수를 곱집합으로 묶어 형성된 집합을 벡터 공간. 벡터 공간의 원소를 벡터(vector)라고 한다.
크기가 1인 벡터를 단위 벡터(unit vector)라고 하고, 모자를 씌워 표기한다.
임의의 벡터를 단위 벡터로 만드는 작업을 정규화한다고 한다. 단위벡터 = 벡터 / 벡터크기
예제 (정규화)
X 입력과 Y 입력을 동시에 누르면 입력 벡터 값이 (1,1)이 되는데 이 크기는 루트2 라서 동시에 누를 때 더 빠르게 움직인다. 그래서 입력을 받은 인풋 벡터를 정규화하여 사용한다.
n개의 스칼라 a와 n개의 벡터 v를 결합해 새로운 벡터를 생성하는 수식을 선형 결합이라고 한다.
모든 a가 0이 아님에도 영벡터를 만들 수 있다면, 선형 결합에 사용된 벡터는 서로 ‘선형 종속의 관계’를 가진다고 표현한다.
반대로 영벡터가 나오기 위해 모든 a값이 0이어야 한다면 ‘선형 독립의 관계’를 가진다고 한다.
선형 독립의 관계를 가지는 벡터를 선형 결합하면 벡터 공간에 속한 모든 벡터를 생성할 수 있다.
평면의 모든 점을 생성하기 위해서는 서로 평행하지 않은 2개의 벡터만 있으면 된다. (선형 독립).
벡터 공간 내 모든 벡터를 생성할 수 있는 선형 독립 관계를 가지는 벡터의 집합을 기저(Basis)라고 한다. 기저에 속한 원소를 기저벡터라고 한다.
(1,0), (0,1)로 구성된 집합을 표준기저라고 하며, 원소는 표준기저벡터라고 한다.
임의의 벡터 (x,y)가 각 θ만큼 회전한 결과 (x’, y’)는
x’ = x cosθ – y sinθ
y’ = x sinθ + ycosθ
arctan 함수를 통해 임의의 벡터 (x,y)와 x축과 이루는 사잇각을 얻어낼 수 있다.
y/x로 tan 값을 얻고 arctan에 넣으면 사잇각이 나온다.
극좌표계(Polar coordinate system)도 자주 쓰인다.
r = 루트(x^2 + y^2)
θ = arctan(y/x)
x = r cosθ
y = r sinθ
행렬
선형 변환을 표현할 때는 행과 열이 크기가 같은 정방행렬(square matrix)를 사용한다.
행렬 곱셈은
- 교환법칙 성립하지 않는다. (곱셈 순서 중요하다)
- 결합법칙 성립한다. (행렬 변환 여러 개를 미리 계산해둬도 됨. 행렬 쓰는 이유)
- 회전 변환행렬 (행 기준)

역행렬이 존재하는지 파악할 수 있는 방법 : 행렬식(Determinant)
2 x 2 행렬

에서 행렬식 = ad - bc
행렬식 값이 0인 선형 변환은 차원이 줄어들기 때문에 역행렬이 존재하지 않는다.
서로 직교하고 크기가 1인 벡터로 이루어진 행렬을 직교행렬이라고 한다.
직교행렬의 역행렬은 직교행렬의 전치행렬이다. 그 예시로 회전행렬이 있다.
회전행렬의 역행렬은 기존 회전행렬을 전치하면 구할 수 있다.
벡터2
벡터 공간에서 이동 연산을 위해 마지막 차원 값을 1로 한정한 부분 공간을 아핀 공간(affine space)이라고 부른다.
백터의 내적(Dot product)
벡터의 내적은 같은 차원의 두 벡터가 주어졌을 때, 벡터를 구성하는 각 성분을 곱한 후 이들을 더해 스칼라를 만들어내는 연산이다. 내적은 곱셈 기호와 동일한 가운뎃점을 사용한다.
v1 = (a,b), v2 = (c,d), v1ᆞv2 = aᆞc + bᆞd = lv1l lv2l cosθ
교환법칙은 성립하고, 결합법칙은 성립하지 않는다.
내적의 활용
스스로 내적
벡터 자기 자신을 내적하고 루트 씌우면 벡터의 크기를 구할 수 있다.
앞뒤 판별
목표물이 캐릭터의 앞에 있는지, 뒤에 있는지 구분하는 방법이다.
v1ᆞv2 = lv1l lv2l cosθ 이기 때문에 내적이 양수면 사잇각이 (-90도, 90도), 내적이 0이면 사잇각이 -90도 또는 90도, 내적이 음수면 사잇각이 그 외의 각도이다. 따라서 v1 = 캐릭터의 시선, v2 = 캐릭터에서 목표물로 향하는 벡터 일 때, v1ᆞv2이,
양수 : 캐릭터 앞에 목표물이 있다.
음수 : 캐릭터 뒤에 목표물이 있다.
0 : 캐릭터 옆에 목표물이 있다.
시야 판별
v1 = 캐릭터의 시선, v2 = 캐릭터에서 목표물로 향하는 벡터, 시야각이 b라고 하면
v1과 v2를 정규화 시키고 내적하고 이를 시야각의 절반 b/2을 cos 한 것과 비교하면 목표물이 시야 내에 있는지 파악할 수 있다.
(v1과 v2를 정규화 시키고 내적) >= cos (b/2) : 목표물이 시야 내에 있음
(v1과 v2를 정규화 시키고 내적) < cos (b/2) : 목표물이 시야 밖에 있음
조명 효과 (램버트 반사 모델)
빛을 받아 표면에서 반사되는 빛의 세기는 표면의 노멀 벡터와 광원으로 향하는 벡터 사잇각의 cos 함수에 비례한다는 내용.
투영 벡터 구하기
a벡터를 b벡터에 투영한 벡터 구하는 방법. 두 벡터 사잇각 θ.
= (ㅣaㅣcos θ ) ᆞ b의 단위벡터
b벡터 크기가 1이면,
= (aᆞb)ᆞb
행렬2
오일러 각 : 회전하는 중심축과 각으로 표현된 회전량.
언리얼엔진 왼손 좌표계 (z업 왼손 좌표계)
소프트웨어마다 좌표계가 달라서, 오일러각 서로 변환하기 좋게 요(Yaw, 위), 롤(Roll, 앞), 피치(Pitch, 오른쪽) 사용.
오일러 각 3차원 회전을 행렬로 표현하면, 각 축마다 행렬로 표현할 수 있다.
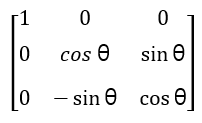
- x축에 대한 회전 (행 기준)
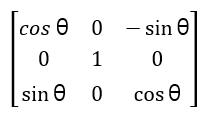
- y축에 대한 회전 (행 기준)
y축에 직교하는 평면은 xz평면이 아니라 zx 평면이기 때문에 좀 다르다.
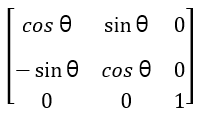
- z축에 대한 회전 (행 기준)
이 세 행렬을 합치면 오일러 회전 행렬이 되는데 언리얼 엔진은 z -> x -> y 순서로 Yaw-Roll-Pitch 순서다. (FRotator에 그냥 넣어주면 알아서 하니깐~)
오일러 각은 세 개의 실수(세 축에 대한 회전각도: Roll, Pitch, Yaw)만 있으면 회전 변환을 정의할 수 있다는 장점. (행렬로 회전을 표현할 때는 3x3 회전 행렬을 사용하므로 9개의 실수가 필요하다.) 그러나 짐벌락 현상이 일어나는 단점.
외적 (Cross product)
외적은 X 기호를 사용한다.
결과물로 스칼라가 나오는 내적과 달리 벡터가 결과물로 나온다.
v1 = (x1, y1, z1), v2 = (x2, y2, z2) 의 외적은
x1 y1 z1
x2 y2 z2
이렇게 해두고 신발끈 공식 쓰는 거다.
v1 X v2 = (y1z2 – z1y2, z1x2 – x1z2, x1y2 – y1x2)
교환법칙과 결합법칙 모두 성립하지 않는다. 대신 v1 X v2 = -v2 X v1 이다.
외적의 활용
평행 판별
a X b = lal lbl sinθᆞn 이다. n은 n은 두 벡터에 수직인 단위 벡터이다.
따라서 평행한 두 벡터 사이 외적은 (0, 0, 0), 영벡터가 된다.
노멀 벡터
결과물로 나오는 벡터가 노멀 벡터(법선 벡터)
좌우 방향 판별 (언리얼엔진 왼손 좌표계 기준)
캐릭터 시선 X 목표물이
- 목표물이 캐릭터 시선의 왼쪽에 있으면 아래쪽 방향 벡터
- 목표물이 캐릭터 시선의 오른쪽에 있으면 위쪽 방향 벡터
- 앞 뒤에 있으면 0
벡터가 결과로 나와서 애매하기 때문에 추가로 평면의 위쪽 방향을 나타내는 벡터 n을 추가해서
(캐릭터 시선 X 목표물)ᆞn의 결과가,
- 왼쪽에 있으면 음수
- 오른쪽에 있으면 양수
카메라 트랜스폼의 회전행렬 구하기 (언리얼 축 기준)
카메라에서 목표물까지 벡터 정규화하고 이를 로컬 x축(앞)이라고 하면,
월드 z축(위)와 로컬 x축을 외적하고 로컬 y축(옆)이 나오고,
로컬 x축과 로컬 y축을 외적하면 로컬 z축(위)가 나온다.
로컬 x y z축 벡터로 아핀 공간 행렬 만들면 카메라 트랜스폼의 회전행렬이 나온다.
백페이스 컬링
폴리곤의 노멀벡터가 카메라가 향하는 벡터와 마주보면 렌더링하고, 마주보지 않으면 렌더링 하지 않는 것. 삼각형 폴리곤일 경우, 두 벡터 외적해서 노멀벡터 구해주고, 카메라 정면 벡터랑 내적해서 음수면 렌더링 해주고, 양수면 렌더링 안 함.
책 [이득우의 게임수학] 저자: 이득우, 출판: 책만
1장부터 11장까지
Leave a comment