[Algorithm] Behavior Tree
행동 트리 (Behavior Tree)
- 행동(Behavior)을 트리(tree) 자료구조로 기술.
- 한 덩어리의 태스크가 서브 트리(sub tree)를 이룬다.
- 깊이 우선 탐색으로 순차적으로 행동 검사.
트리의 구성 요소
- root 노드 : 루트 노드.
- control flow 노드 : 루트도 리프(leaf)도 아닌 노드.
- execution 노드 : 리프 노드. 사실상 Behavior는 이것.
자식 노드는 부모 노드한테 결과를 반환합니다
- Success (성공)
- Failure (실패)
노드
출처 : https://steemit.com/ai/@leeyoosung/ai-behavior-tree
Control flow 노드
(1) Composite Node
하나 이상의 자식 노드를 가질 수 있다.
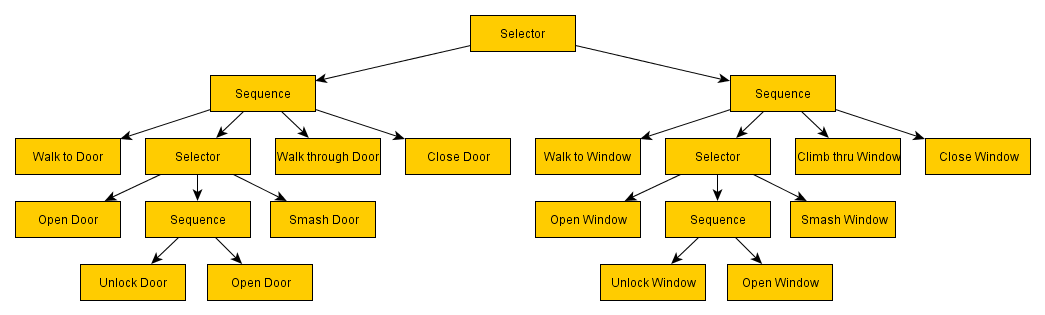
- Sequence : 순차적으로 자식을 탐사하여 자식 노드에서 Failure가 반환되는 즉시 Failure를 반환. 모든 자식 노드가 Success되면 Success 반환.
- Selector : 순차적으로 자식을 탐사하여 자식 노드에서 Success가 반환되는 즉시 Success를 반환. 모든 자식 노드가 Failure되면 Failure 반환.
(2) Decorator Node
오직 하나의 자식을 가지며 자식 노드의 결과를 변형하거나 반복하는 등의 역할을 하게 된다.
- Condition : 조건에 따라 자식을 실행하거나 실패를 반환합니다.
- Loop : 일정 횟수, 혹은 무한히 자식을 반복 실행합니다.
- Inverter : 자식의 결과를 반대로 바꿔서 반환합니다.
Execution 노드
최하위 노드로 행동 그 자체다. 실제 게임에 필요한 로직(걷기, 공격 등)이다.
- Precondition(조건) : agent가 이 behavior를 실행할 수 있는가?
- Action : behavior 실행 시 agent가 실제로 하는 일
조건에 따라 Action을 하고, 부모 노드에게 Success나 Failure를 반환.
장점:
- Simplicity : AI 로직을 쉽게 파악 가능. 구현이 쉽다. 깊이 우선 탐색으로 진행됨.
- Stateless : 상태의 전환이 없으므로 이전 상태에 대해 기억할 필요가 없다.
- Unware of each other : 각 behavior는 다른 behavior를 몰라도 된다. 디커플링. FSM은 서로 얽히고 얽혀서 추가/삭제시 다른 애들도 고려했어야 함.
- Extensibility : 독립성이 좋아서 확장하기 좋음
- etc. : 노드의 재사용성 좋음, 트리 구조라 시각화 툴 제작이 용이하다.
단점
- 실행 시간이 FSM보다 크다.
- 잘못 구현하면 거대한 조건문을 양산하게 됨.
- 하드웨어 성능을 고려해야 함.
- Selector의 자식 노드가 많을수록 AI의 의사결정이 지연될 수 있다.
- 행동 트리의 탐색 순서가 행동에 영향을 미친다. (왼쪽 -> 오른쪽 탐색)
TMI Zone
Utility Systems
심즈 처럼 수 많은 가능한 행동이 있는 게임. 수 많은 고려사항에 기반한 선호하는 행동의 선택.
이런 경우 Utility Systems => 확률을 넣는 방법도 있음.
나중에 더 알아보자.
Leave a comment